
oweis
Reading
浅谈
CAN总线
IKSEMI推出CAN通讯芯片IN2515ADT IN2515ATSDT
CAN总线历史
The first part
CAN(Controller Area Network)总线,即控制器局域网总线,是一种功能丰富的车用总线标准。该协议最初是由德国博世(Bosch)公司在1983年制定的1987年,Intel公司推出的首款CAN总线芯片(82526)上市销售
1993年,国际标准化组织(ISO)发布了CAN标准ISO 11898,CAN标准被重新编译分成两个部分:ISO 11898-1涵盖了数据链路层,ISO 11898-2涵盖了高速CAN总线的物理层
ISO 11898是针对通信速率为125Kbps~1Mbps的高速通信标准另一个标准ISO 11519是针对通信速率为125Kbps以下的低速CAN通信标准
后来ISO 11898-3:2006替代了ISO 11519,到了现在CAN总线芯片支持的通信速率最高波特率也已达5Mbps。
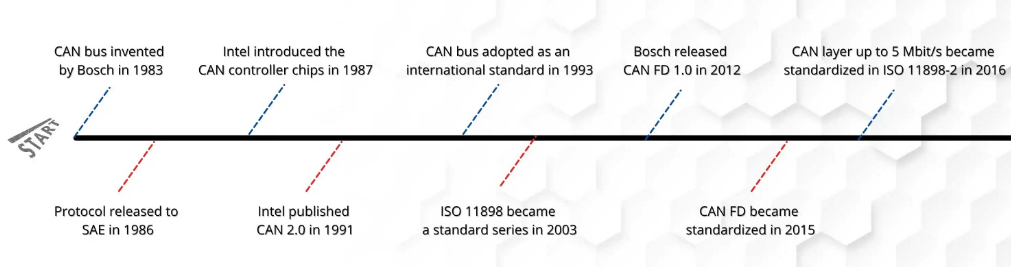

CAN总线版本分为2.0A、2.0B、FD,并且新一代的协议标准也即将推出CAN总线也是五个应用于车载诊断 (OBD)-II标准的协议之一。
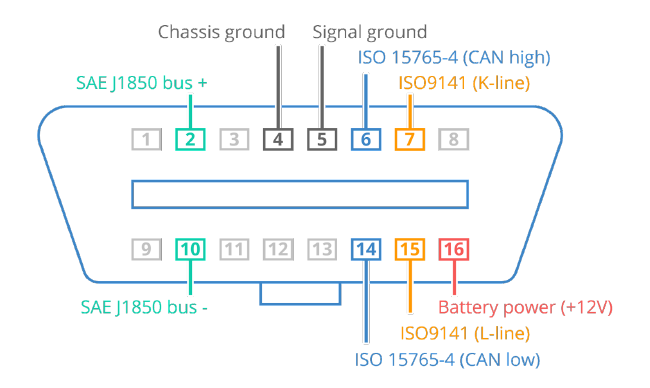
汽车OBD2接口
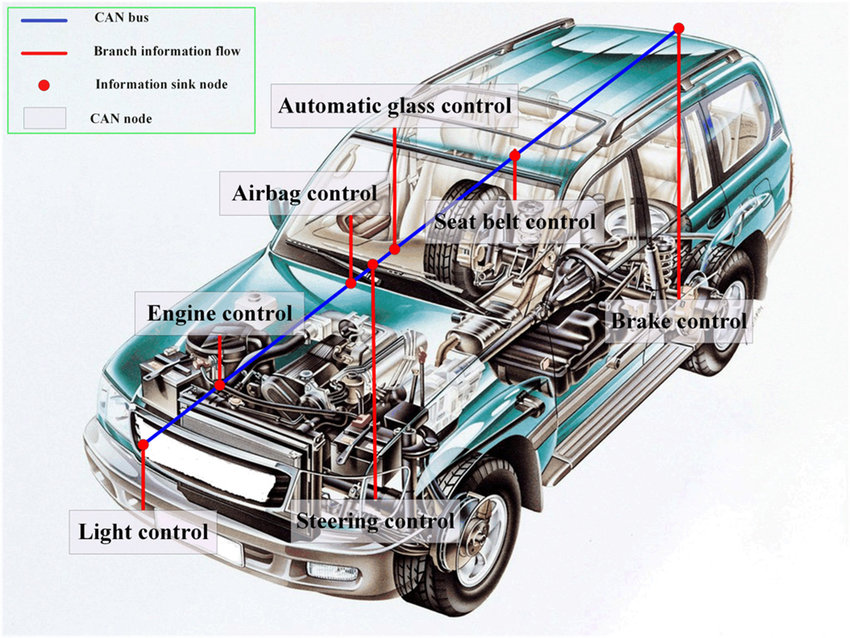
汽车产业中,出于对安全性、舒适性、方便性、绿色环保节能的要求,各种各样的电子控制系统不断被开发出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。CAN总线是一种基于消息传递的协议,设计之初就是为了在车辆上实现复用通信线缆,以降低铜线使用量。它是一种异步串行通讯低层网络,用于在不需要主机的情况下实现网络上的微控制器和各仪器之间相互通信。它可以提高系统性能,简化控制系统,提高可靠性和灵活性
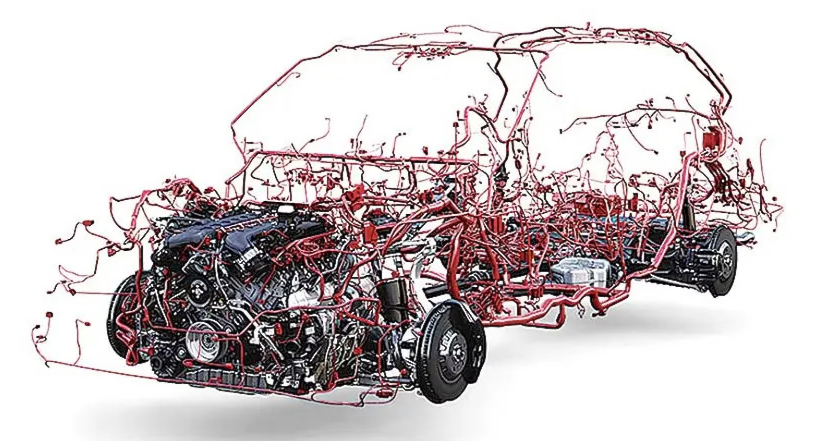
车辆电路网络分布
CAN总线标准具有非常多的优势,它可以支持高速数据传输,并且可以支持多种不同的物理层协议,数据传输协议,应用层协议和网络类型。它具有较高的安全性和可靠性,可以支持多种不同的应用场景,可以支持节点之间的自动发现和自动配置,可以支持大量的节点,并且可以同时处理多个节点之间的数据传输

汽车CAN总线应用
CAN总线应用于各种控制领域,比如航空,航海,医疗器械,物联网,自动化,建筑机械电子等各种工业控制领域;




CAN总线应用场景
/////
ISO/OSI模型
The second part
ISO/OSI基本参照模型是一种概念模型,由国际标准化组织提出,是一个试图使各种计算机在世界范围内互连为网络的标准框架,其定义于ISO/IEC 7498-1。该模型将通信系统中的数据流划分为七个层,从分布式应用程序数据的最高层表示到跨通信介质传输数据的物理实现。每个中间层为其上一层提供功能,其自身功能则由其下一层提供,功能的类别通过标准的通信协议在软件中实现,类比TCP/IP网络协议模型
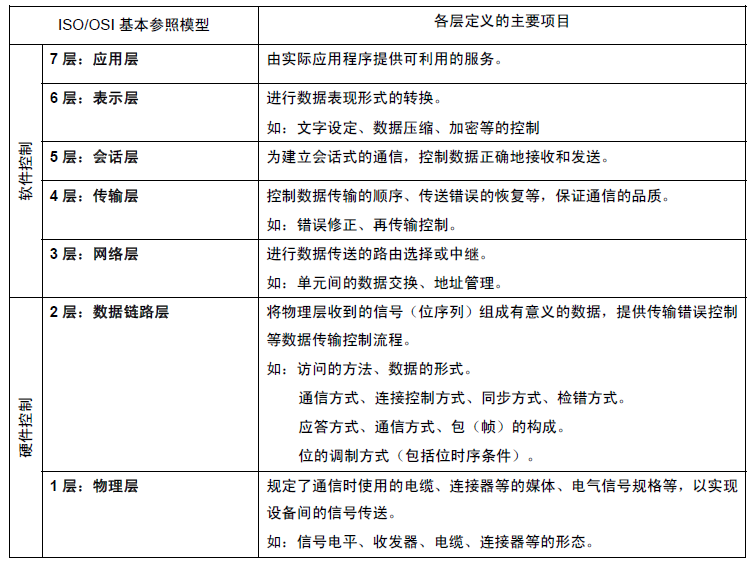
ISO/OSI基本参照模型
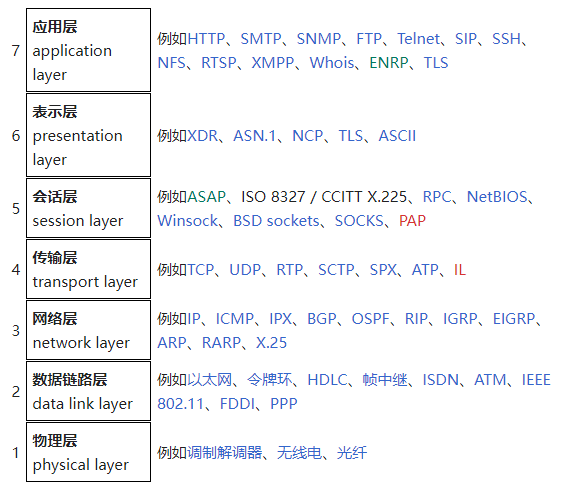
TCP/IP计算机网络协议
/////

CAN总线的硬件实现
The Third part
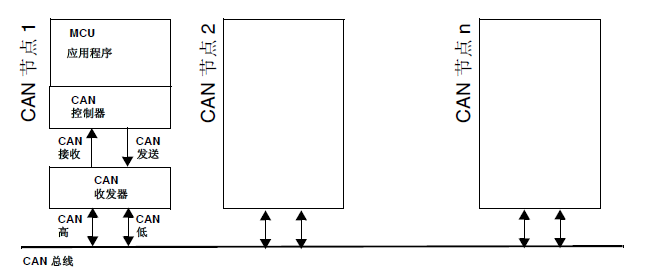
CAN网拓扑结构
CAN总线的物理层使用双绞线作为网络介质,两个信号分别称作CAN_HI和CAN_LO,他们组成一对差分信号,由CAN总线节点的物理层接口———总线收发器驱动
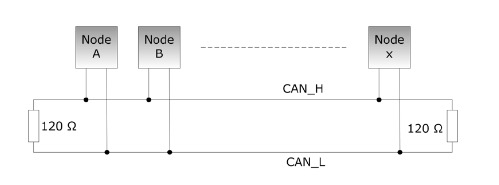
它的具体硬件电路实现有两种模式,分别对应前面提到的高速标准和低速标准电路,其中高速、短距离的是“闭环网络”,它的总线最大长度为40m,通信速度最高为1Mbps,总线的两端各要求有一个“120 欧”的电阻。
/////

另外一种低速、远距离的“开环网络”,它的最大传输距离为1km,最高通讯速率为125Kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个“2.2 千欧”的电阻。
一般情况下一辆汽车上会包含高速和低速两种线路,会根据数据需求的紧急程度来确定哪些信息使用高速通信线路
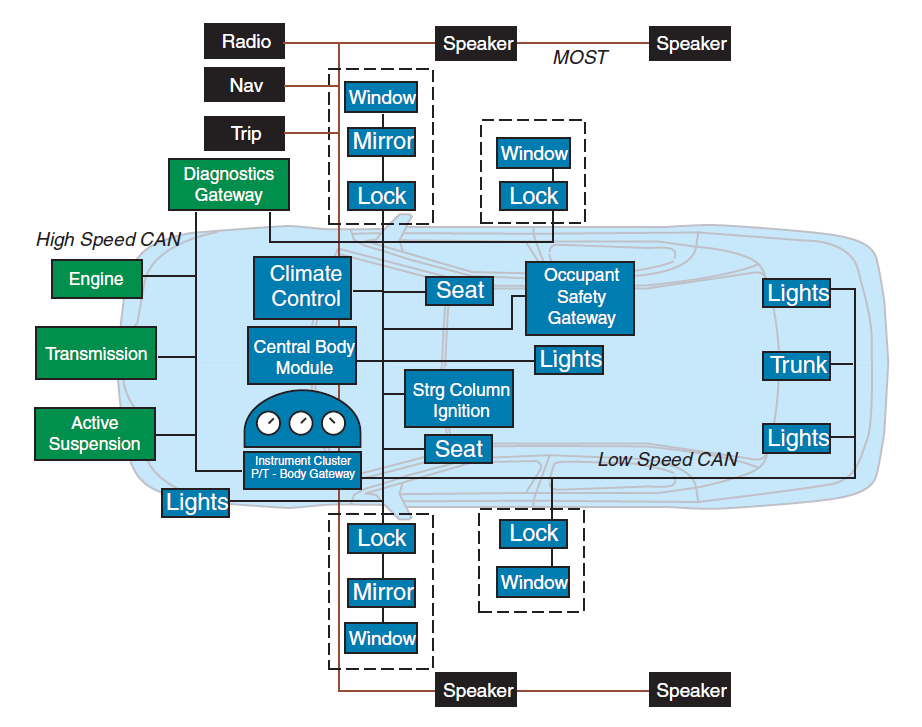
汽车CAN总线控制网络分布
CAN总线通信信号与两线电平关系:
总线电平 = CAN_H 的电压 – CAN_L 的电压。
显性电平对应逻辑 0,CAN_HI拉高,CAN_LO拉低。
隐性电平对应逻辑 1,CAN_HI,CAN_LO均浮空
CAN总线的规范中,将二进制位‘0’定义为“显性位”或“显性信号”、‘1’定义为“隐性位”或“隐性信号”。在传输显性位‘0’时,CAN_HI信号将被拉高到CAN总线收发器的工作电源电压VDD,同时CAN_LO信号将被拉低到CAN总线收发器GND。传输隐性位‘1’时,CAN总线收发器不驱动CAN_HI和CAN_LO两个信号,即两个信号处于浮空状态。两种通信速率电路的电平信号稍有不一样,但处理方式相通
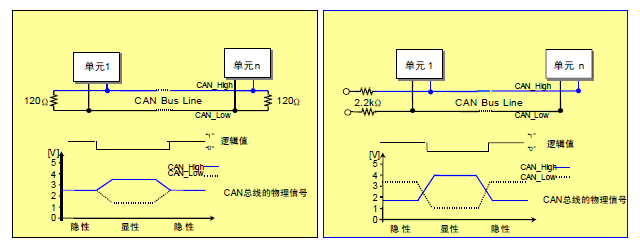
两种速率电路信号对比
/////
CAN总线的硬件实现
The last part
 0755-82544779
0755-82544779


Copyright © 2013 深圳市奥伟斯科技有限公司版权所有 All Right Reserved ICP备:粤ICP备12049165号

 蔡先生
蔡先生 